 مکالمه رایگان ایرانسل به مناسبت روز اردبیلزمستان سختتر از تابستان در انتظار اقتصاد؟ | سیاست ناتراز دولت در مدیریت بحران برق و گازامید به بازار بورس برگشت | حقوقیها کدام نماد را بیشتر خریدند؟تصاویر گالری ایرانیان چگونه سر از شبکههای اخاذی درمیآورد؟ببینید| پژوهشگر امنیت شبکه: فیلترینگ یک اقدام ضدامنیت استفکتچک| پاک کردن تاریخچه مرورگر یعنی هیچ ردپایی باقی نمیماند؟قیمت طلا، دلار و سکه امروز شنبه 3مرداد 1405/ کاهش قیمت ها + جدول و جزئیاتموج بعدی گرانی موبایل در راه است؟رونمایی از نقشه راه جدید زیستبوم فناوری کشورقرعهکشی کوئیک سایپا امروز برگزار میشود؛ زمان اعلام نتایج مشخص شدپیشبینی بازار سهام امروز شنبه ۳ مرداد ۱۴۰۵ | عوامل موثر بر قدرت متقاضیانجهش ۳۰ هزار واحدی شاخص کل / بورس مرداد را طوفانی آغاز کردردپای پول در یک گروه بورسی پررنگتر شد | نیمی از بازار مثبت معامله میشودسیل نقدینگی به بازار طلا / ۵۳ همت پول وارد صندوقها شداتفاق مهم در بازار رمزارزها / بیتکوین وارد فاز تازه شدبا توزیع عادلانه خاموشیها، برق صنایع قطع نمیشود| لزوم به کارگیری ذخیرهسازههای انرژی۳۰۰ همت منابع، وام ۳۶۵ میلیونی با سود ۲۳ درصد؛ تسهیلات ودیعه مسکن چقدر حمایتی است؟زائران پاکستانی اجازه ورود زمینی به عراق ندارند
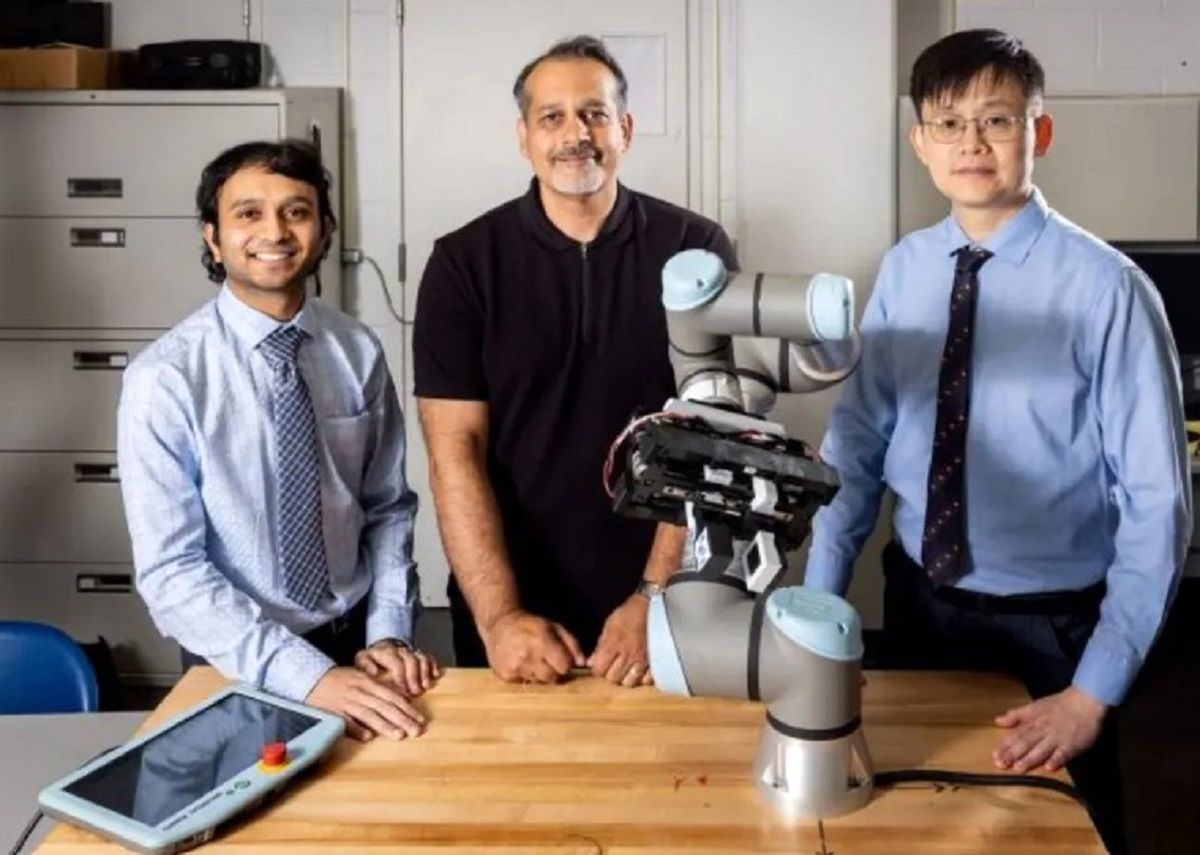
مکالمه رایگان ایرانسل به مناسبت روز اردبیلزمستان سختتر از تابستان در انتظار اقتصاد؟ | سیاست ناتراز دولت در مدیریت بحران برق و گازامید به بازار بورس برگشت | حقوقیها کدام نماد را بیشتر خریدند؟تصاویر گالری ایرانیان چگونه سر از شبکههای اخاذی درمیآورد؟ببینید| پژوهشگر امنیت شبکه: فیلترینگ یک اقدام ضدامنیت استفکتچک| پاک کردن تاریخچه مرورگر یعنی هیچ ردپایی باقی نمیماند؟قیمت طلا، دلار و سکه امروز شنبه 3مرداد 1405/ کاهش قیمت ها + جدول و جزئیاتموج بعدی گرانی موبایل در راه است؟رونمایی از نقشه راه جدید زیستبوم فناوری کشورقرعهکشی کوئیک سایپا امروز برگزار میشود؛ زمان اعلام نتایج مشخص شدپیشبینی بازار سهام امروز شنبه ۳ مرداد ۱۴۰۵ | عوامل موثر بر قدرت متقاضیانجهش ۳۰ هزار واحدی شاخص کل / بورس مرداد را طوفانی آغاز کردردپای پول در یک گروه بورسی پررنگتر شد | نیمی از بازار مثبت معامله میشودسیل نقدینگی به بازار طلا / ۵۳ همت پول وارد صندوقها شداتفاق مهم در بازار رمزارزها / بیتکوین وارد فاز تازه شدبا توزیع عادلانه خاموشیها، برق صنایع قطع نمیشود| لزوم به کارگیری ذخیرهسازههای انرژی۳۰۰ همت منابع، وام ۳۶۵ میلیونی با سود ۲۳ درصد؛ تسهیلات ودیعه مسکن چقدر حمایتی است؟زائران پاکستانی اجازه ورود زمینی به عراق ندارندمژده کرمانشاهی- یک پژوهشگر ایرانی و همکارانش نوعی حسگر مبتنی بر پارچه ساخته اند که با قابلیت چنگاندازی و گرفتن بلادرنگ، می تواند ابزارهای جراحی رباتیک، اندامهای مصنوعی و چنگکهای صنعتی را بهبود بخشد.
به گزارش اکوایران، امروزه رباتها پیشرفت قابل توجهی کردهاند و میتوانند طیف وسیعی از وظایف پیچیده را با دقت، سرعت و هماهنگی شگفت انگیزی انجام دهند. اما با وجود این پیشرفتها، هنوز در کارهایی مانند حس کردن و واکنش به لمس، با مشکل مواجهاند.
به لطف دستاورد محققان دانشگاه بوفالو این محدودیت ممکن است بهزودی تغییر کند.
گروهی از پژوهشگران دانشگاه بوفالو یک پارچه الکترونیکی (E-textile) ابداع کردهاند که میتواند نحوه حس کردن فشار، لغزش و حرکت توسط پوست انسان را تقلید کند.
این نوآوری به انگشتان رباتیک امکان میدهد تا به طور بلادرنگ و در لحظه، واکنش نشان داده و انگشتان خود را در صورت نیاز سفت یا شل کنند، که پیشرفت مهمی در مهارت و چابکی است.
این پیشرفت میتواند نحوه تعامل رباتها با اشیاء فیزیکی در محیطهای تعاملی همکارانه مانند تولید، جراحی و پروتزها را متحول کند.
این دستاورد یک گام بلند به سوی ماشینهای حساستر و پاسخگوتر بهویژه در محیطهایی که نیاز به کنترل حرکتی دقیق دارند است.
مجریان این طرح می گویند کاربردهای این فناوری بسیار هیجانانگیز است. از این فناوری میتوان در وظایف تولیدی مانند مونتاژ محصولات و بستهبندی آنها استفاده کرد و در مجموع قابلیت استفاده در هر موقعیتی که انسانها و رباتها با هم همکاری میکنند را داراست. همچنین میتواند به بهبود ابزارهای جراحی رباتیک و اندامهای مصنوعی کمک کند.
IE نوشت، حسگر پارچهای از طریق اثر تریبوولتائیک برق تولید میکند، فرآیندی که در آن اصطکاک بین مواد یک سیگنال جریان مستقیم (DC) ایجاد میکند. محققان این حسگر را روی انگشتان رباتیک چاپشده بهصورت سهبعدی نصب و آنها را به یک چنگک انطباقپذیر توسعهیافته در دانشگاه بوفالو متصل کردند.
این سیستم بهطور فوق العاده ای پاسخگو بود. بسته به آزمایش، در کمتر از ۰.۷۶ میلیثانیه و حداکثر در ۳۸ میلیثانیه واکنش نشان داد. گیرندههای لمسی انسان معمولاً در بازه ۱ تا ۵۰ میلیثانیه پاسخ میدهند.
محققان می گویند این سیستم فوقالعاده سریع است و کاملاً در محدوده معیارهای بیولوژیکی عملکرد انسانی قرار دارد. ما دریافتیم که هرچه لغزش قویتر یا سریعتر باشد، پاسخ حسگر قویتر است – این اتفاق خوشایندی است زیرا ساخت الگوریتمهای کنترلی را که به ربات امکان عمل با دقت را میدهند، آسانتر میکند.
در یک آزمایش، محققان سعی کردند یک وزن مسی را از چنگ ربات بیرون بکشند. سیستم حرکت را حس کرد و بهطور خودکار چنگش خود را افزایش داد تا شیء را بدون خرد کردن آن ایمن نگه دارد.
احسان اصفهانی، دانشیار ایرانی دانشگاه بوفالو و یکی از نویسندگان این مطالعه، گفت: ادغام این حسگر به چنگک رباتیک امکان میدهد تا لغزش را تشخیص دهد و نیروی چنگش و انطباق خود را بهصورت پویا تنظیم کند. این حسگر قطعه گمشدهای است که دستهای رباتیک را یک قدم به عملکرد مشابه دست انسان نزدیکتر میکند.
این دانشمندان معتقدند: حسگر ما مانند پوست انسان عمل میکند؛ انعطافپذیر، بسیار حساس و بهطور منحصربهفردی قادر به تشخیص نهتنها فشار، بلکه لغزش و حرکت ظریف اشیاء.
آنها اکنون قصد دارند سیستم را با ادغام یادگیری تقویتی برای بهبود الگوریتمهای کنترلی بیشتر آزمایش کنند.
موارد کاربرد بالقوه شامل پروتزهای پیشرفته، ابزارهای رباتیک دقیق برای جراحی و سیستمهای تعامل انسان و ماشین پیشرفته است.
این دانش پژوهان در حال بررسی سازگاری حسگر با پلتفرمهای رباتیک مختلف است.
نتایج این تحقیقات در نشریه Nature Communications منتشر شده است.

شاخص تازه بانکداری بیتکوین با هدف ارزیابی میزان استفاده ۲۵ مؤسسه مالی بزرگ از این رمزارز معرفی شد.

بیتکوین با رشد ۱۳ درصدی به ۶۵ هزار دلار بازگشته، اما دادههای آنچین نشان میدهد این حرکت بیشتر بر پایه معاملات اهرمی است تا تقاضای واقعی.

مسئله قانونمندی بازار ارز دیجیتال، یکی از دغدغههای اصلی کاربران ایرانی است. بسیاری میپرسند آیا خرید و فروش بیت کوین قانونی است؟ و در مقابل، عدهای نگراناند که مبادا فعالیت در این بازار تبعات حقوقی داشته باشد. پاسخ به این سوال که آیا خرید بیت کوین غیر قانونی است؟ شفاف نیست زیرا وضعیت حقوقی بیت […]

یکی از سوالهایی که خیلی از تازهکارها و حتی معاملهگران باتجربه میپرسند این است که آیا ساعت معامله اهمیت دارد؟ آیا فرقی میکند که ساعت سه بامداد ترید کنیم یا ساعت سه بعدازظهر؟

اکوایران: قیمت طلا، دلار و سکه در معاملات امروز کاهشی شد.

اکوایران: در ادامه قیمت طلا و سکه براساس اعلام اتحادیه طلا و جواهر تهران را مشاهده میکنید.











دیدگاهتان را بنویسید